Stage 4
Processing
Northern.Lights.Experience – Iceland
My masters kicked off with a unit trip to Iceland, in November 2016, this journey provided me a unique opportunity to experience the border of the Arctic Circle, a landscape unlike anything I’ve previously experienced, as well as the chance to see the northern lights. Unfortunately, the weather proved to bad for our group to get an opportunity to see this natural phenomenon. This promoted me to investigate the challenges associated with viewing the northern lights as a theme for my fourth year design project.
This scheme follows on from my initial data-mining exercise into ideal locations for photographing the northern lights in the Reykjanes Peninsular, Iceland, which can be read in detail here: Data-Mine: Photography In Iceland. The data obtained from this initial investigation helped me to identify an ideal location for my proposal, which was a small peninsular on the west bank of Lake Kleifarvatn in the Krýsuvík Geothermal Region.
Introduction – Site Local

Based on initial site analysis of the Krýsuvík Geothermal Region as well as my first hand experience whilst in Iceland I discovered that at present there are limited opportunities for photographers and tourists to experience the northern lights. The present methods include:
Short night tours via coach:
- Couple of hours
- Lower chance of seeing the lights
- Relatively inexpressive
Long multi-night tours via coach:
- Couple of days
- Higher chance of seeing the lights
- Prohibitively expensive
Self-driving, hiking and camping:
- As long as you want
- Medium chance of seeing the lights, depends on persons knowledge.
- Relatively cheap
To further compound to this challenge is the lack of formal accommodation outside of the large cities such as Reykjavik.
Material System Proposal
My proposal consists of a dedicated northern lights viewing park, situated on the shore of lake Kleifarvatn in the Krýsuvík Geothermal Region. The park shall include a dedicated day & night visitor centre for tourists as well as more isolated accommodation units along the banks of the lake, ideally suited for professional photographers.
As the Northern Lights are such an ephemeral phenomenon, I wanted to try capture the visual characteristics of the Northern Lights which I could translate into an architectural language. This would provide a visual trace of the qualities of the Northern Lights to be experienced by visitors during the day, as well as at times when the lights are not visible.
In order to achieve this I started investigating a material system based on similar particle physics which are found in the science behind the Northern Lights. In order to experiment and create simulations of hundreds to thousands of particles, I started to study The Nature of Code by Daniel Shiffman to help me understand how to code a particle system in Processing 3.0
Stage 1: A Basic Particle System
My first attempt at a particle system investigates the fluidity of movement found in the Northern Lights and seeks to organise it in a constructed space. I utilised Processing 3.0 and developed a basic physics engine following my research on the Nature of Code. The process, followed here, is generated by three forces (gravity, attraction and repulsion) the latter two are applied to the particles (agents) via set points. The agents are activated by emitter points and during their course leave a trail behind for us to recognise the nature of their trajectory. As the process develops we get a variety of results according to different configurations and applied values.
From this ongoing process I chose to model a moment which presents a balance between different dynamics. I converted a set of trails from simple curves into (lofted) meshes in order to generate geometry out of mapped movement.
e – # of emitters
a – # of attractors
as – attractor strength
r – # of repellers
rs – repeller strength
Stage 2: A Particle System with behaviours
A key limitation I discovered in stage 1, was that the agents had no encoded logic and therefore could not interact or affect one-another. Furthermore, the forms which were produced had little to no structural integrity.
In order to resolve these limitations I decided to investigate how I could have greater influence over the initial environment in which the agents would traverse and explore methodologies which would allow the agents to procedurally behave based on their imminent surroundings. My first goal was to produce an environment which had encoded meaning, I decided that it would be useful if the environment expressed structural data which the agents would then interact with.
A methodology I had earlier investigated whilst learning Grasshopper was that of Topological Optimisation. I used Millipede, a structural analysis and optimisation component for Grasshopper, as it is able to produce a vector field which describes the internal stresses (compression and tension) of applied loads and/or the self-weight of a structure (see image to right.)
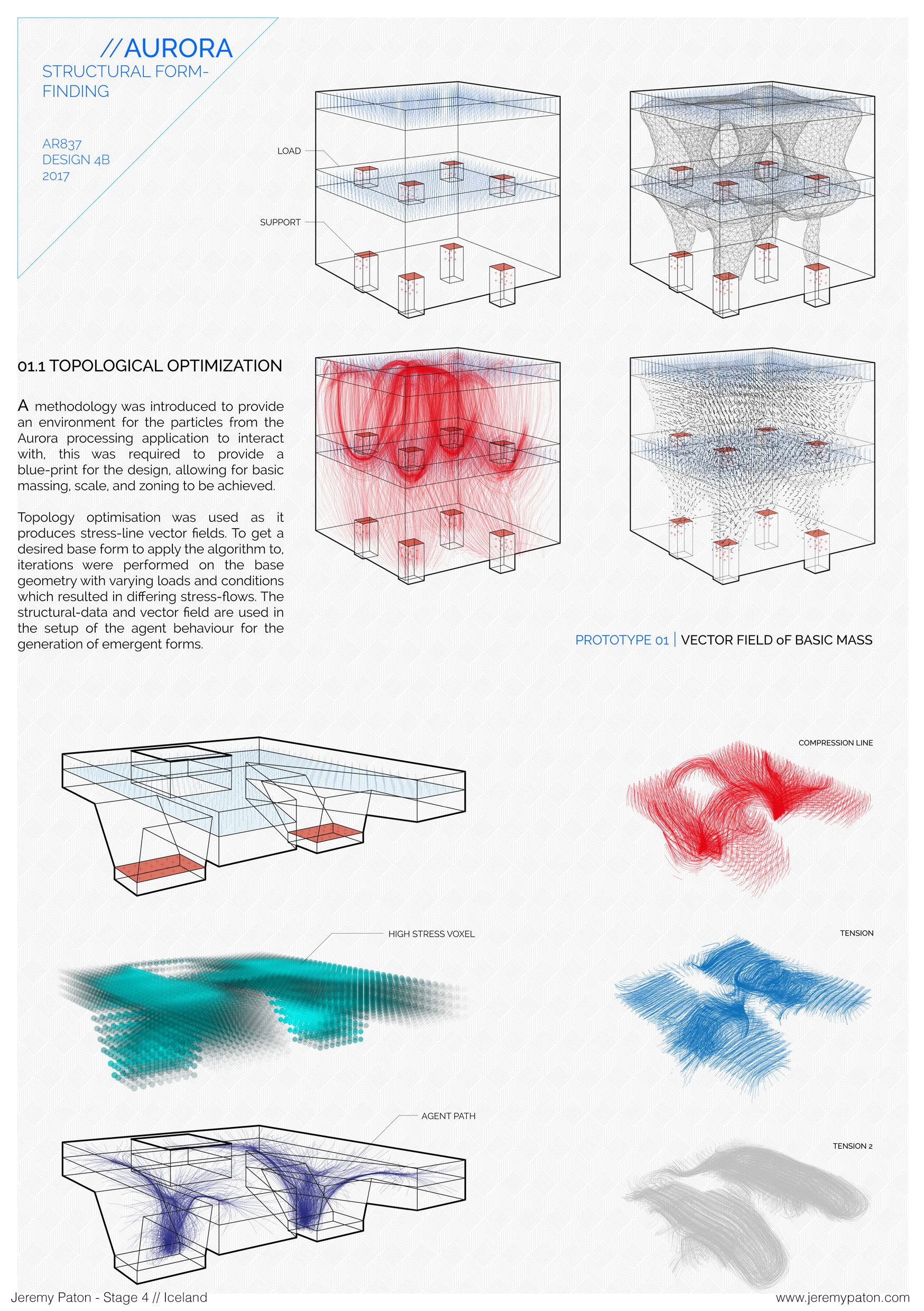
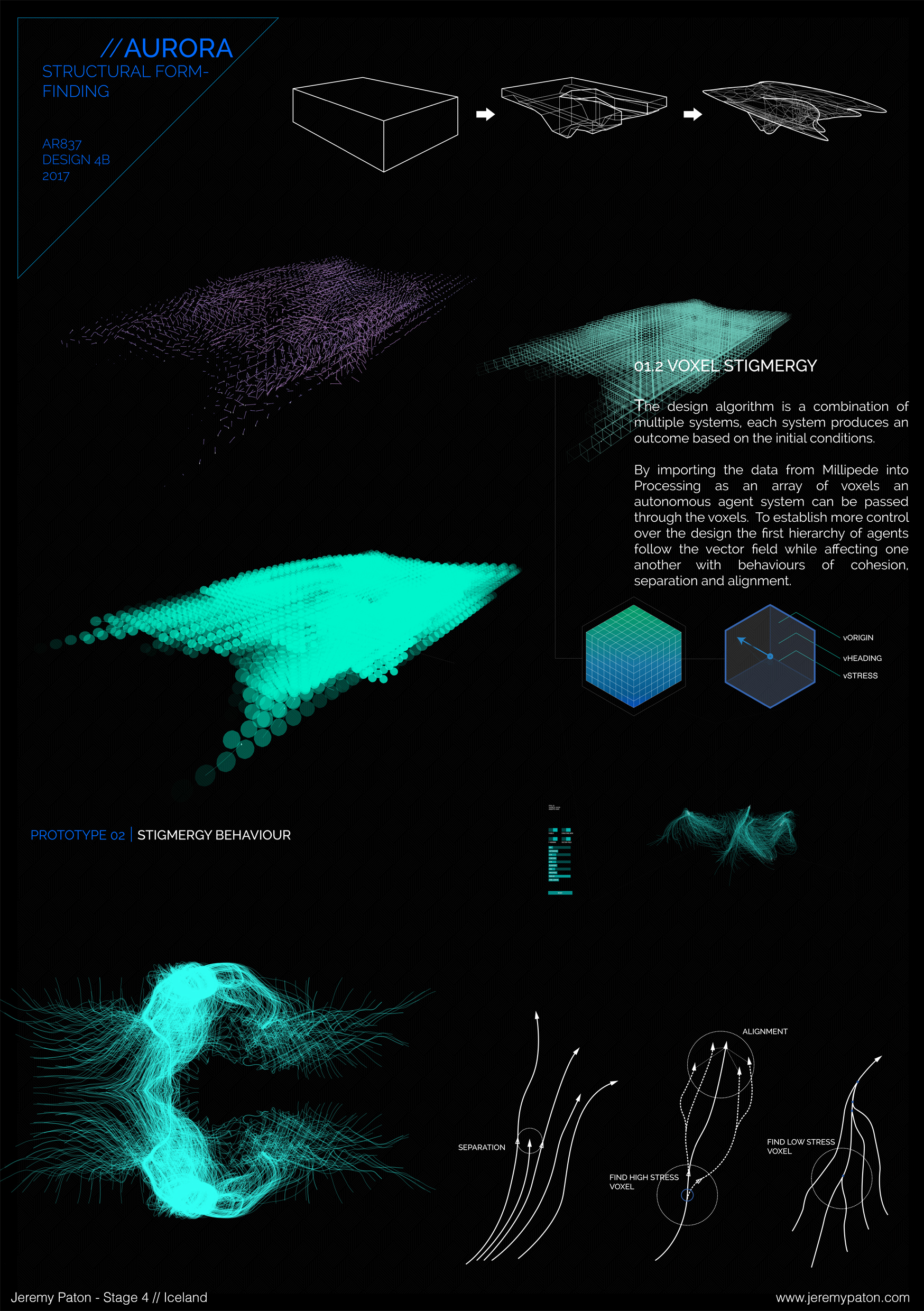
The resulting data from the Topological Optimisation on a base form was then passed to a new Processing application which I coded. The data was passed from Millipede to my application as an array of voxels. Each voxel contains a three properties (Origin, Heading and Stress) (see image to right.)
Finally, within the Stage 2 Processing application, I encoded each agent to have three core behaviours (Separation, Alignment and Cohesion). The weighting coefficient of each of these behaviours could be adjusted in real-time within the application (see video bellow). These weightings were also dynamically altered per agent as they traverse the vector field. When a region of high stress is discovered an agent will desire to separate and the alignment coefficient is magnified in order to apply more material in a unified direction (resulting trails) within this region of high stress. The inverse also takes place in regions of low stress were the agent desires to join its closest neighbour resulting in a reduction of applied material in this region.
Architectural Program
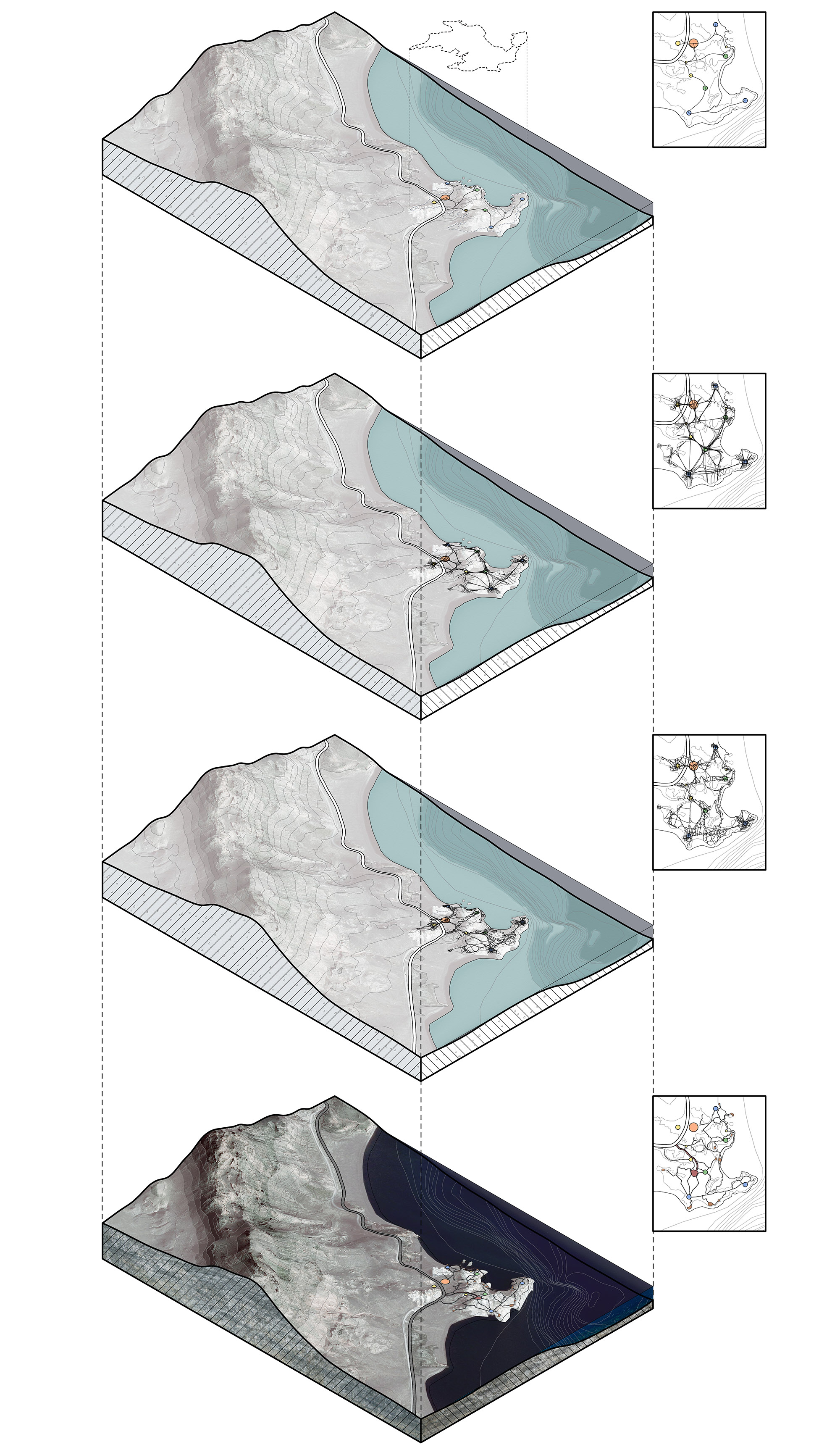
Continuing with the theme of capturing the visual characteristics of the Northern Lights, the master-plan was informed by the locations of photographs identified in my initial data-mining application, as well as a multi-stage process of sub-dividing a grid which connects these points in the landscape.
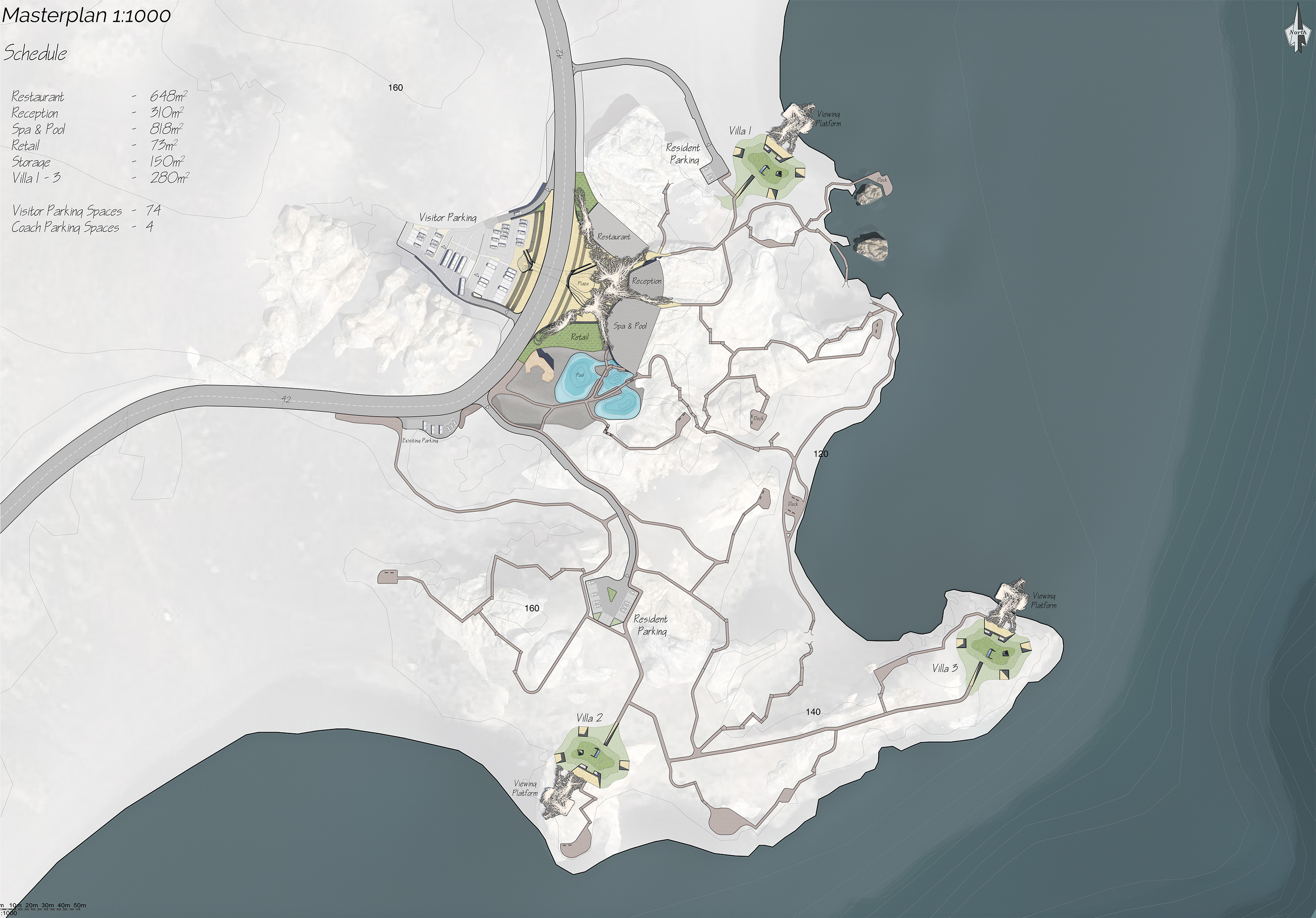
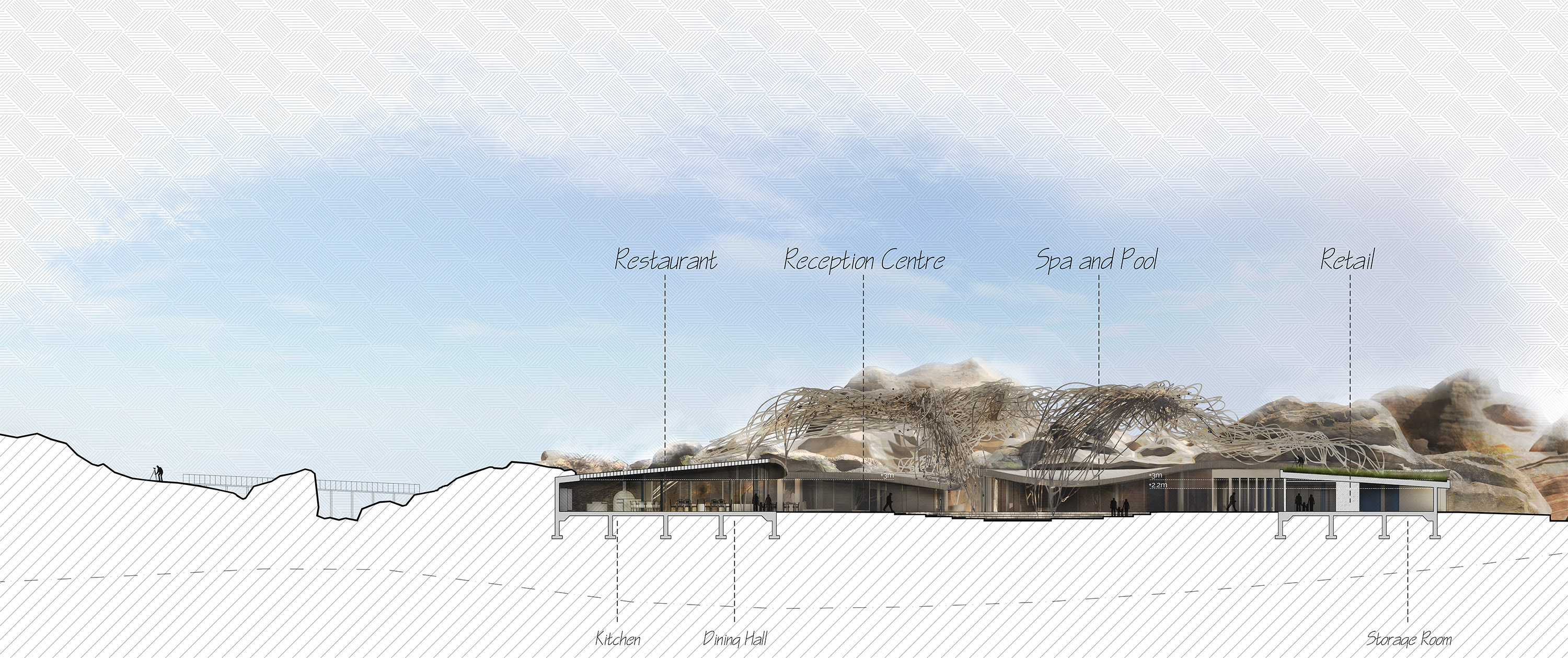
The proposal, as stated above, includes a dedicated visitor centre and a series of accommodation units. The visitor centre acts as a hub of activity providing amenities for the visitors including a restaurant, spa and geothermal heated pool, retail facilities, reception and accommodation for a limited number of on site staff.
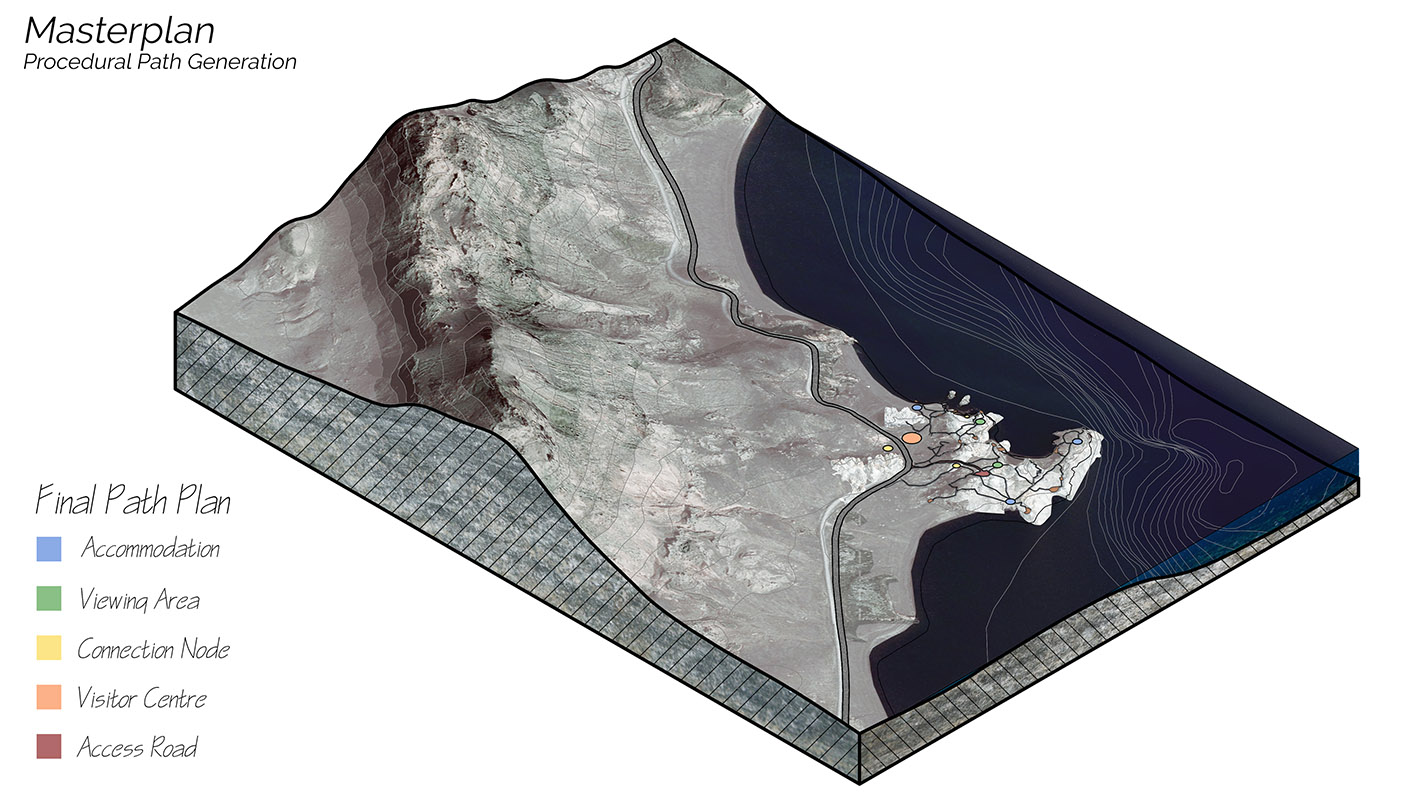
The master plan bellow illustrates the visitor centre, connecting routes throughout the park and the three accommodation units.
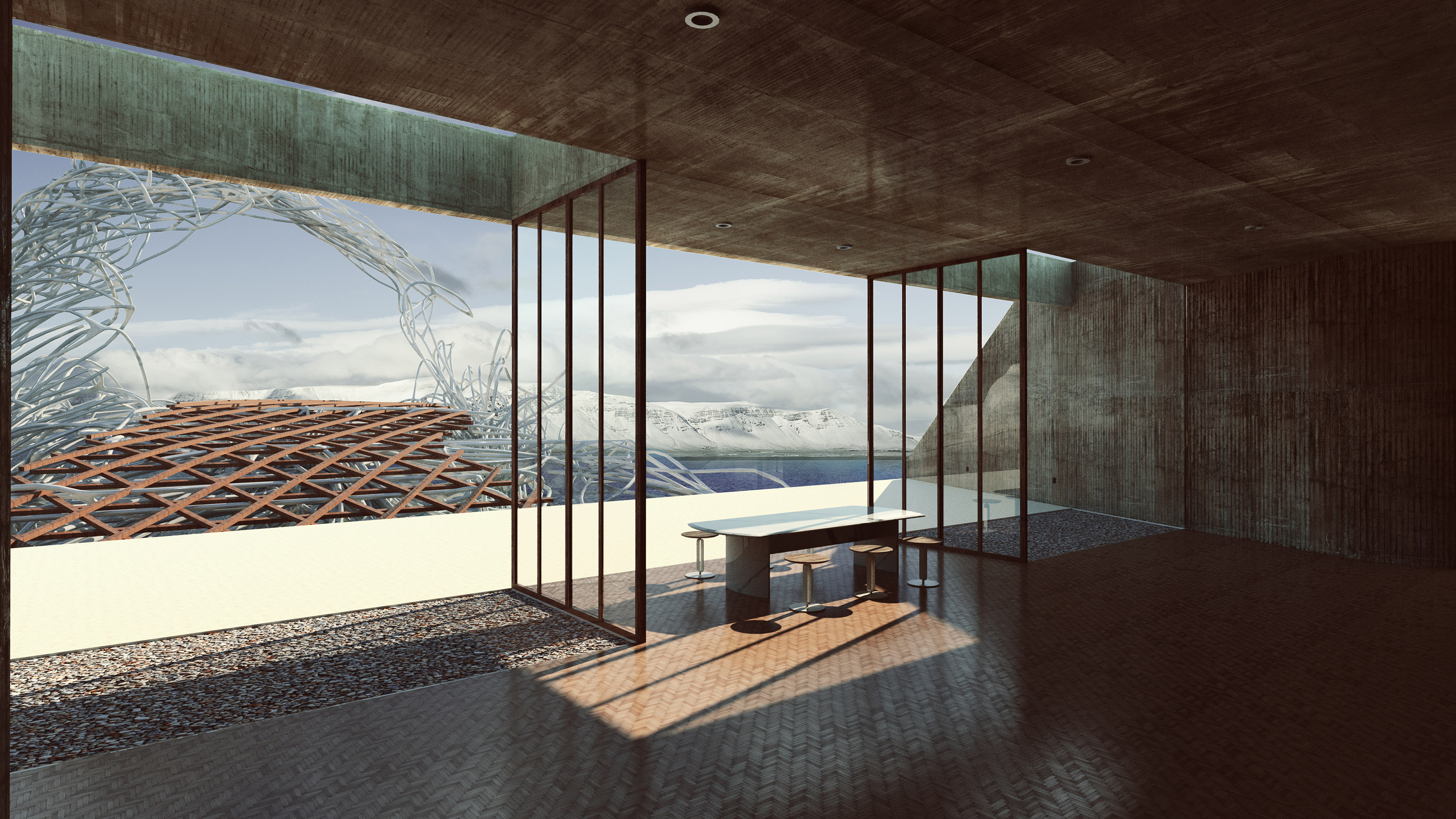
The forms produced from the particle simulations act as an abstract roof over the visitor centre plaza and platforms on which visitors who are staying in one of the accommodation units can explore and take photographs of the Northern Lights and surrounding landscape.
Villa and Viewing Platform Master Plan
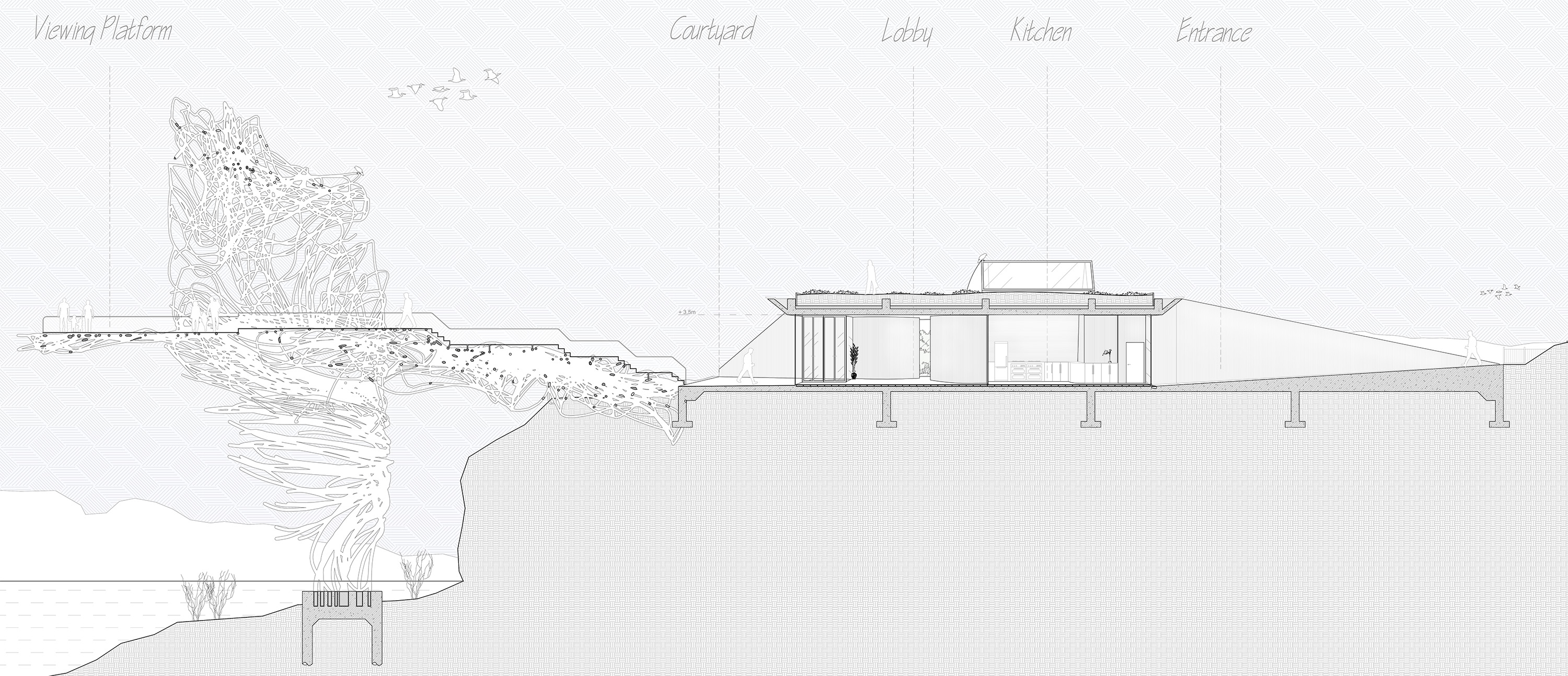
The site situates three villas, which can be booked by tourists for holiday’s. Each villa has been situated in ideal positions for views over Lake Kleifarvatn and the Northern Lights. Each villa has a unique viewing platform structure which evokes the forms, patterns and motion of the Northern Lights and provide a sense of the Northern Lights for visitors who do not get an opportunity to see the lights.
North Section

East Section
Villa and Viewing Platform Section
View From The Villa

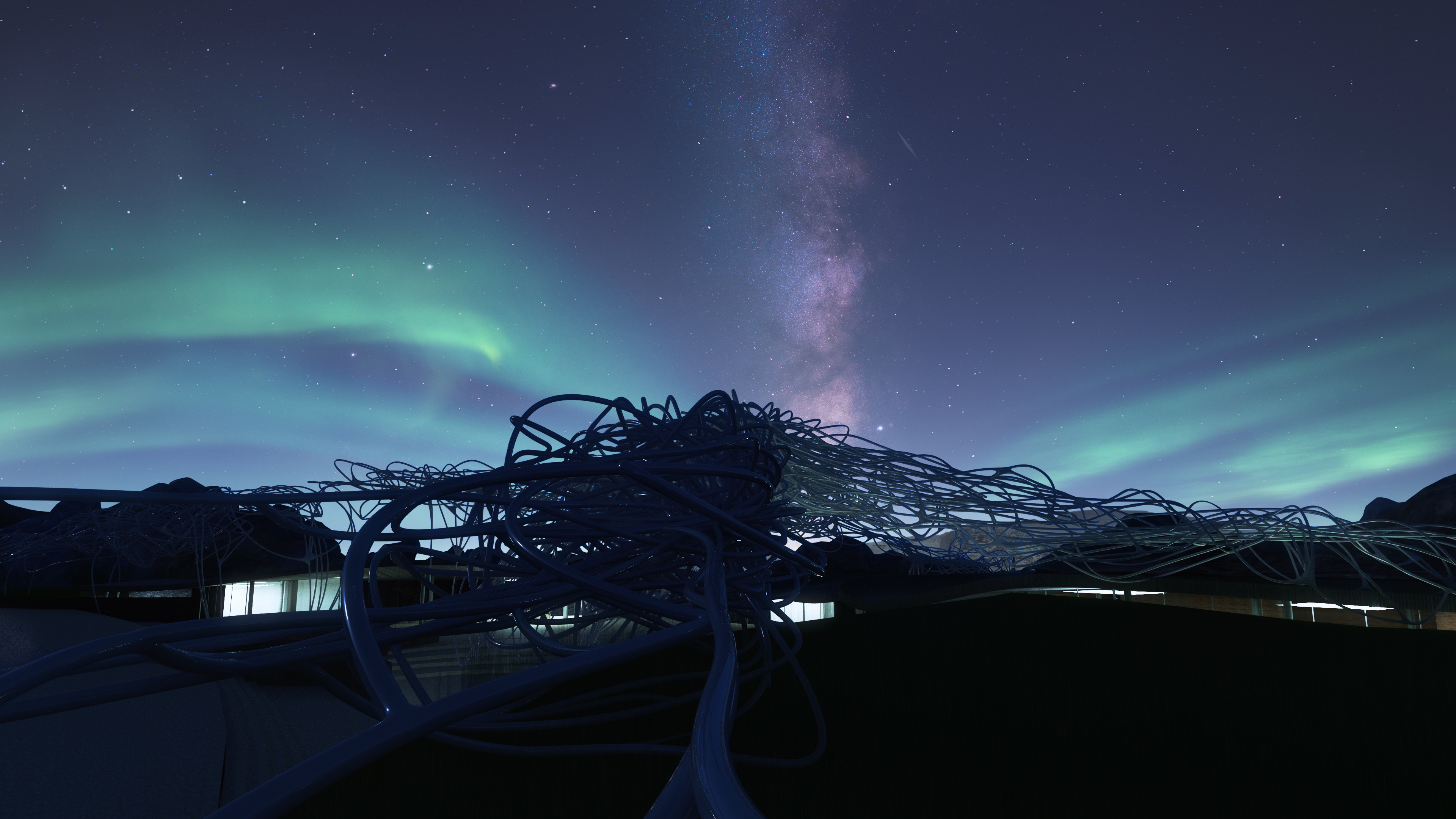
Night View Over Visitor Centre
3D Printed Model

